

 QQ
QQ
工博士机器人技术有限公司作为智能工厂服务商,从智能制造解决方案的提供,到工业电气产品的一站式采购,从智能制造培训到专业维护保养,围绕设备的智能升级改造、生产加工、设备保障、技能培训等多个方面,实现生产的智能、高效、环保和安全。 公司具备研发、工艺、单元产品、成套装备、自动化生产线、售后服务、质量控制等在内的自主核心技术,已形成工业机器人系统解决方案的完整产业价值链
主营ABB(ABB)、库卡KUKA、安川YASKAWA、发那科FANUC(fanuc)、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等进口机器人项目集成、机器人代理、机器人配件、机器人售后维保、机器人培训一站式服务。
地址:上海市嘉定区南翔镇众仁路399号B座20楼(19921272665)
--------------------------------------------------------------------------------------------------
1、为什么要零点校正在机器人零点校正时, 轴被移到一个定义的机械位置, 即所谓机械零位. 如果机器人在这机械零位, 那么每个轴的***传感器值被存储。

2、何时需要标定零点?
原则上,机器人必须时刻处于已标定零点的状态。在以下情况下必须进行零点标定:
(1)在将机器人投入运行时。
(2)在对参与定位值感测的部件(例如带分解器或RDC的电机)采取了维护措施之后。(3)当未用控制系统(例如借助于自由旋转装置)移动了机器人轴时。
(4)在机械维修/出现问题之后﹐根据不同的要求进行零点标定或负载零点标定,并应用测得的偏差。3、零点校正测量工具
3、零点校正测量工具

4、SEMD/MEMD 校准组件介绍


5、下面介绍“标准方法”零点标定
(1)选择T1工作方式,将机器人移到预零点标定位置。

(2)在主菜单中选择投入运行 > 零点标定 > EMD > 带负载校正 > 首 次零点标定。一个窗口自动打开。所有待零点标定的轴都显示出来。编号***小的轴已 被选定。

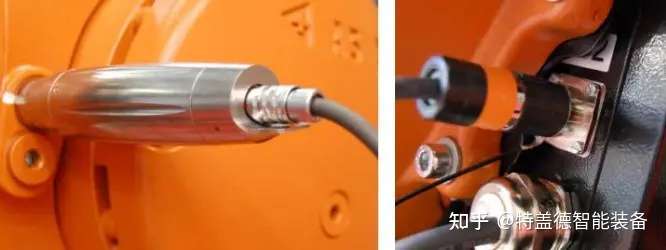
(3)从窗口中选定的轴上取下测量筒的防护盖。(翻转过来的 EMD 可用作螺 丝刀。) 将 EMD 拧到测量筒上。
(4)然后将测量导线连到 EMD 上,并连接到机器人接线盒的接口 X32 上。
(5)点击零点标定。
(6)将确认开关按至中间挡位并按住,然后按下并按住启动键。

(7)***后,执行启动后,校准完了,机器人故障信息(如图4-1)将消失。

结束语:库卡机器人的零点标定步骤相对比较多,但是只要按照步骤一步一步完成就可以解决丢零点问题。大家快去试试吧。
“特盖德机器人租赁”的微信公众号,是为了帮助更多人学习机器人相关知识和掌握实操经验而建立的平台,经常免费发布很多行业资讯和学习资料。
更多咨询:库卡机器人


